不变性(invariance set)
不变性分为不变集(invariant set)和对称不变性(symmetry)
不变域
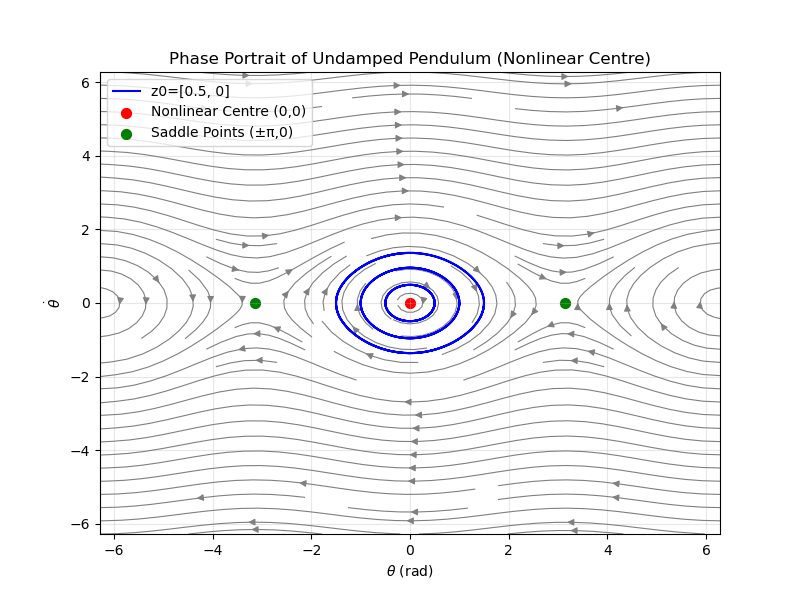
如果在不变域中, 那么对于任意的 , 都有. 而不变域实际上是轨迹的集合. 对于特征值为纯虚数的平衡点centre, 每一个闭合的轨迹都是不变域.
一般来说, 不变域的描述是. 在这个域上, 函数为一个常值, 即他对于的导数值为0. 就是 .
对称不变性
对于方程. 如果有映射能使得, 那么就称为系统的一个symmetry.
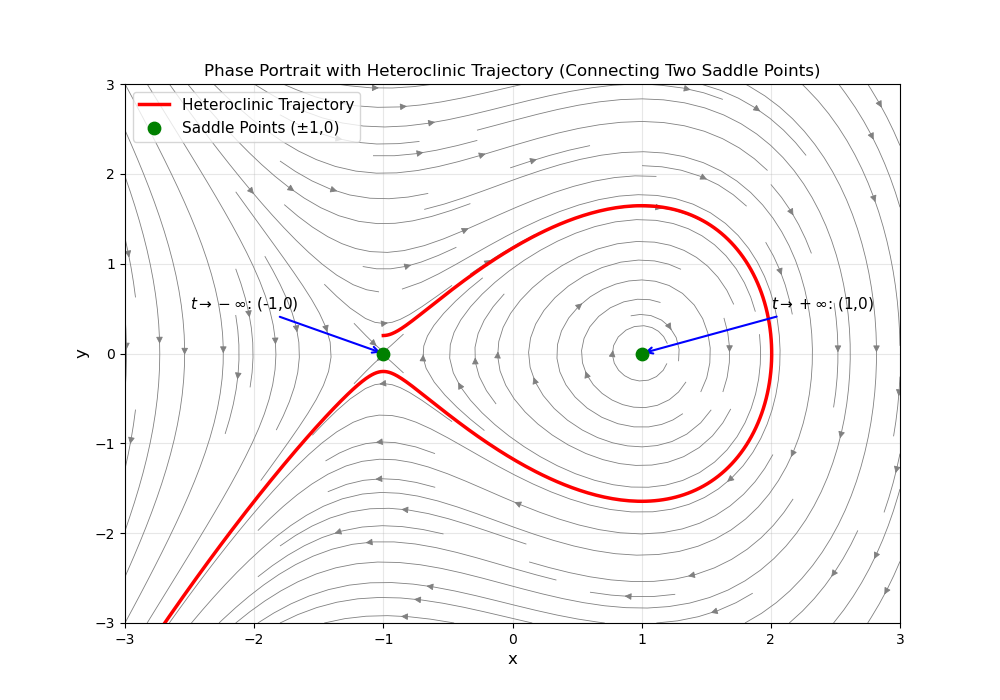
例如, 对于系统, 不难发现和是两对symmetry. 同时, 由于方程组的对称性, 还存在一个不变域, 其导数为.
同时, 一个具有对称不变性的系统可能会存在非线性中心(nonlinear centres)和异宿轨道(heteroclinic trajectories), 具体图像如下
吸引子(attractor) 和 吸引域(Basin of attraction)
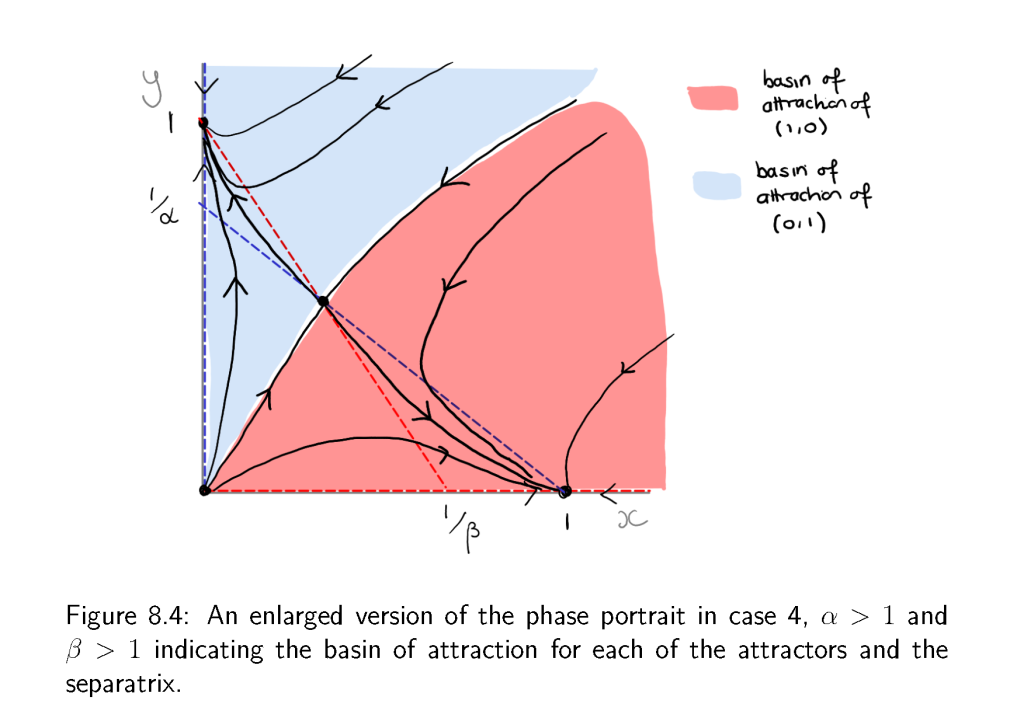
吸引子是是动力系统中所有邻近轨道都趋向收敛的不变集合. 且这个不变域要足够小, 使得其中有且只能有一个吸引子.
每个吸引域对应一个吸引子. 任何以吸引域内的点作为初始值的都最终会在时趋于该吸引子. 如图所示
极坐标
对于方程组, 假设. 就有. 于是可以得出. 对于, 有. 于是. 由于, 所以. 仅需化简一下, 就有. 于是.
仅需记住和即可. 如果, 那么节点不稳定, 反之则稳定. 如果, 那么轨迹的方向就是逆时针(角度增大).
那么为什么要引入极坐标呢?
由于在非线性方程组的局部线性是由Hartman-Grobman理论给出. 其局限性在于实部为0时失效. 所以对于求出的平衡点为linear centre和non-isolated equilibrium point时, 我们需要借助极坐标来进一步判断.
注意此时我们仅对linear centre进行极坐标讨论. 其有可能变成spiral. 而对于non-isolated equilibrium point, 未看见方法.
Comments NOTHING