今天主要学习的是用矩阵的特征值求解二元一次的线性微分方程组. 重点在相图(phase portrait)上. 主要分为特征值重合和不重合的情况.
特征值不重合
特征值是实数(与0关系), 和特征值为复数的情况.
特征值均大于或小于零, 得到的是抛物线状的图像, 相线轨迹trajectorie方向由特征值正负号决定. 抛物线的对称轴是特征值的绝对值大的一方.
特征值异号, 那么平衡点就是鞍点(saddle point). 图像成X型, 方向为, 首先沿着小于0的特征向量, 然后再变成沿着大于0的特征向量.
其中一个特征值为0时, 图像为直线簇, 方向沿着特征值不为0的特征向量. 另一特征向量小于0时, 上的每一个点都是稳定点, 如果大于0就是不稳定点. 称为line of non-isolated equilibrium points. 在非线性情况下, 如果该矩阵为某平衡点的雅可比矩阵, 那么该点称为 non-isolated equilibrium point.
特征值为复数, 看其实部. 如果实部不等于0, 那么其图像呈螺线状. 实部大于0就是unstable spiral, 方向发散. 小于0就是stable spiral, 方向收敛朝向平衡点. 考试时要通过nullcline上的方向和stable或unstable来给出顺/逆时针, 但仅需写From the nullclines we see that it is clockwise/anti-clockwise, 再进行作图.
如果实部等于0, 那么图像就是相似的同心椭圆形, 平衡点称为linear centre.
特征值重合
分为的情况.
时, 其平衡点称为star node. 如果则稳定; 则不稳定. 图像为从平衡点发散的直线簇.
时, 轨迹基本上都是向前或向后的S型轨迹. 判断向前还是向后则是通过零倾线(nullcline). 此时平衡点称为退化节点(degenerate node).如果则稳定, 为向后s型; 则不稳定平衡点为degenerate unstable node(退化不稳定结点), 图像为向前s型.在解这类微分方程时, 也是解空间的一个向量.
向前的s型本身就是S的样子, 向后的是S关于y轴的镜像对称.
具体图像
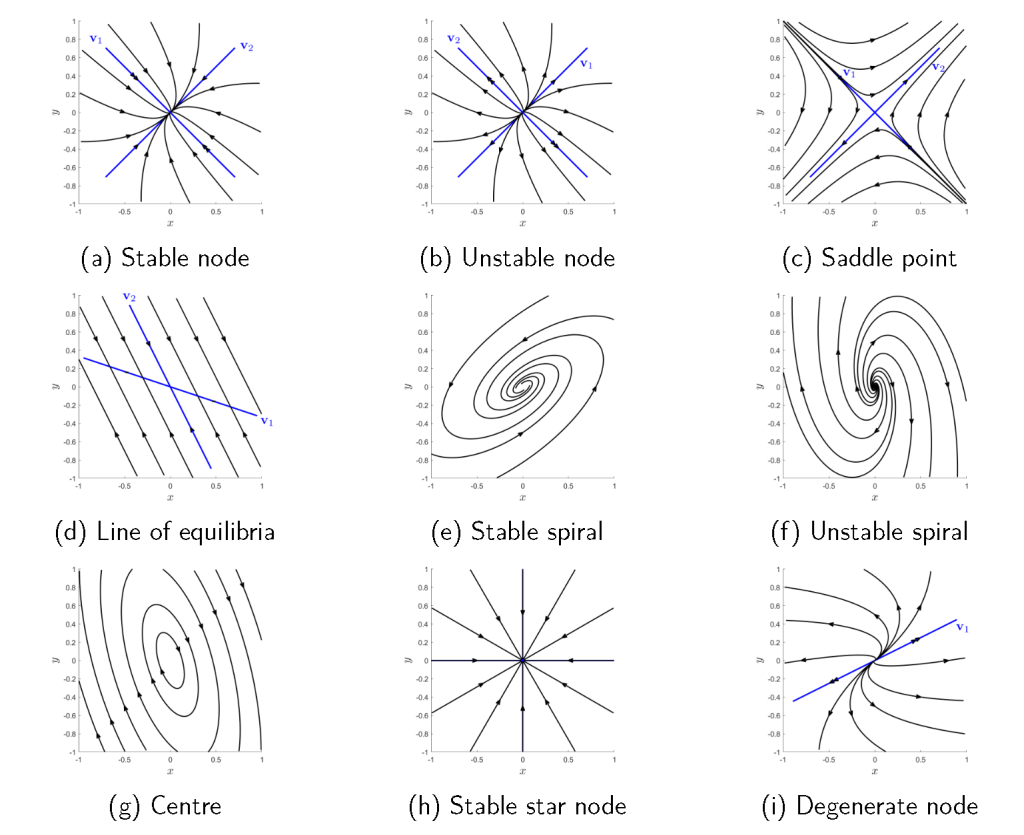
绘图时的表述
因为(特征值的性质), 稳定点就是(名词). (轨迹特征). Using the eigenvector and nullclines we sketch the phase portait.
轨迹特征:
(a)&(b): Trajectories move away from the origin along both eigenvectors, but faster along the eigenvector corresponding to (特征值绝对值大的一方).
(c): 无需描述.
(d): Since one of the eigenvalues is zero, there is a line of equilibrium points which is the eigenvector correspnding to the zero eigenvalue, . All trajectories approach/move away from this line in the direction of since (大于或小于0).
(e)&(f): From the nullclines we see that it is anti-clockwise/clockwise.
(i): From the nullclines we see that the trajectories are backwards/forwards ‘s’ shapes. (图中为backwards)
考试预测
重点可能并不会放在线性微分方程组上, 而是在非线性上. 所以第八章可能是一个重点. 内容在于考察多个平衡点(取值使都为0的点)对应的雅可比矩阵, 从而求出平衡点的类别, 再以此进行多个平衡点之间图像的衔接.
Comments NOTHING